jonh : robots :
fiat : experiments
Experiments
Experiment 1
This experiment was designed to measure the reliability and repeatability
of the paper pickup and drop mechanism. For each observation, the
robot was placed at a known location, with a piece of paper placed
below it at approximately the correct location for pickup. The robot
was commanded to pick up the paper, rotate 180 degrees, drop the
paper, and rotate 180 degrees to its initial position.
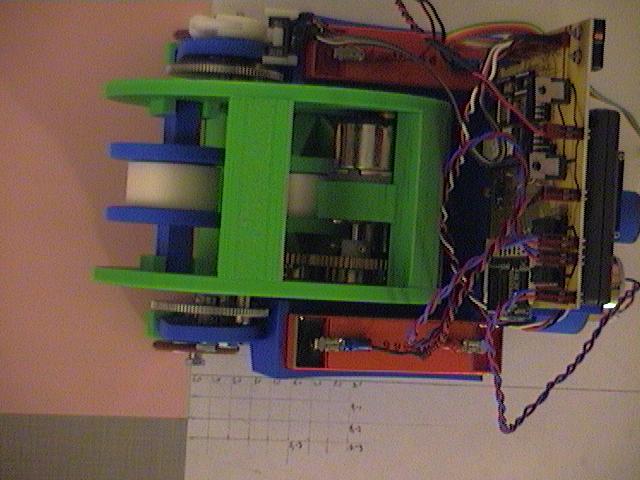
The experimental setup
After the motion was complete, I measured the position of one corner of the
paper (on the grid visible in the photograph), and measured the intercept
of one edge of the paper along a vertical line (beyond the right edge of the
photograph).
The procedure was repeated 141 times.
The observations and analysis are available in this
table.
Qualitative observations.
Several failure modes appeared during the course of the experiment.
- Failure to pick up the sheet or hold onto the sheet during rotation.
- This happened frequently during the first 84 experiments, at which
point I realized that the cam was twisting, which it shouldn't have done
by its design. I found a loose set screw on the shaft that couples the
left and right side cam gears, and tightened it. After that, this failure
mode never recurred.
- Failure to cleanly release the paper at the end of travel.
- This happened in 8 of the 58 cases after the loose setscrew was
tightened (14%).
The paperDrop() primitive includes a wiggle to loosen the paper in
just this case; in all eight cases, the paper ended up near enough to its
goal that it was measurable; these failures contribute to the position
error reported below.
- Cam phase error.
- The sensor that detects the phase of the cam assembly signalled
``end of travel'' incorrectly in 5 of the 58 final observations (9%).
Four times, the paper was never picked up or never released, and the paper
ended up nowhere near the target zone. Those four observations do not
contribute to the reported position error, and instead are counted as
failures. This was the only source of failure (paper landing nowhere near
the target) after the set screw was fixed, leading to a 93% success rate.
Reliability. Over the 141 experiments, the paper ended up in the
measurable target region 113 times, giving an 80% success rate.
Over the 58 experiments performed after the set screw was tightened,
the paper ended up in the measurable target region 54 times, giving
a 93% success rate.
Repeatibility.
For each observation, I derived the angle of the paper from the vertical
intercept value. Then I computed the mean and standard deviations of the
position vector and the angle value.
The mean is fairly uninteresting. It represents systematic error; error that
can be compensated for in software by calibrating the odometry to the measured
mean position.
The standard deviation, on the other hand, reflects the how repeatably the
robot can place a sheet of paper near its target.
Over the 113 successful runs, one standard deviation was less than
0.89 cm positional error and 4.7 degrees rotational error.
Over the 58 runs performed after the set screw was tightened,
one standard deviation was less than 0.51 cm positional error and 3.3 degrees
rotational error.
Conclusions.
We can conclude the following:
- Assuming the robot can navigate accurately, the robot can position paper
fairly accurately (within half a centimeter and a few degrees).
- Once the set screw was tightened, there was only one failure mode
that prevented the paper from reaching the target area.
The failure was due to a faulty cam sensor. Because this device
senses the internal state of the robot, it should be possible to replace
it with a much more reliable encoder.
- The only other directly observable source of error was ``sticky release.''
A redesigned cam mechanism in which the wheels are closer to the sticky foot
should reduce this problem by taking up some of the slack in the paper.
Experiment 2
This experiment was designed to learn how well the robot could manipulate
paper, one sheet above others on the desk.
We commanded the robot to lift a sheet of paper from a stack, navigate
through 60 centimeters and a 90 degree turn, deposit the paper, and return
to its initial position; this sequence was repeated three times to move
a stack of three sheets to make a new stack at the goal position.
This experiment was performed when the set screw was still loose (it happened
chronologically before experiment 1).
This is the experiment that appears on the video.
Other than the sorts of errors observed in experiment 1, I
also observed that the robot, in the process of picking up the top sheet
on a stack, shifted the whole stack on the desk. This had two consequences:
First, the stack was now in a different place, so when the robot returned,
the stack was not where it was expected. Second, this would sometimes result
in a second sheet being exposed and sticking to the foot. It wasn't stuck
very well, and tended to fall off at random places en route to the goal.
The cause of the stack-scooting problem is that
when the cam moves horizontally, the robot's length is effectively increasing.
Because the front wheel is not back-driveable and has a high coefficient
of friction, the paper gives instead. An alternative design with the back
wheels driven and the front wheel free might solve this problem.