Smack Pusher
Team members: Jonathan Bredin (r), Rob Fitch (l).
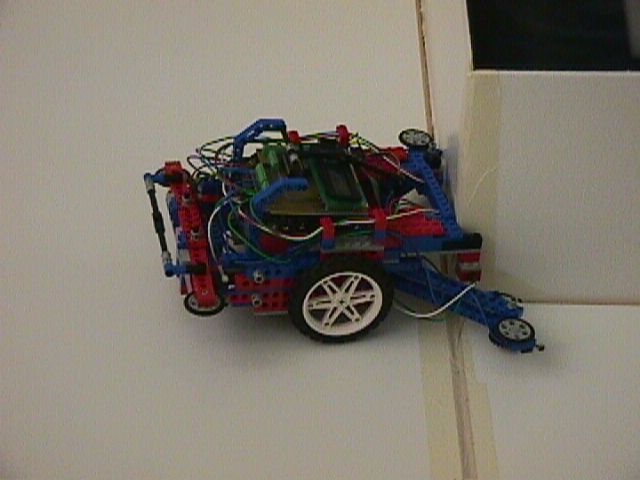
Robot strategy: Smack into walls to align itself
in one linear dimension and in orientation, and push home
one food at a time. This robot also used wheels at its periphery
for compliant motion.
Transmission is differential drive (one motor directly
coupled to each wheel).
The robot does not trap food; the food does not slide
out of its ``grasp'' during turns.